


- 頭條提取并抑制永磁同步電機(jī)電流諧波的有效方法2021-01-26 作者:王碩 康勁松 | 來源:《電工技術(shù)學(xué)報》 | 點擊率:導(dǎo)語同濟(jì)大學(xué)電子與信息工程學(xué)院的研究人員王碩、康勁松,在《電工技術(shù)學(xué)報》2019年第4期上撰文(論文標(biāo)題為“一種基于自適應(yīng)線性神經(jīng)網(wǎng)絡(luò)算法的永磁同步電機(jī)電流諧波提取和抑制方法”)指出,永磁同步電機(jī)通常采用正弦波進(jìn)行驅(qū)動和控制,由于氣隙磁場的畸變和電壓型逆變器的死區(qū)效應(yīng)等因素的存在,使永磁同步電機(jī)電流波形含有大量的諧波而發(fā)生畸變,特別是在電機(jī)低速運行時更為嚴(yán)重。 為了進(jìn)一步提高永磁同步電機(jī)的電流控制性能,抑制電流諧波,本文在傳統(tǒng)矢量控制算法基礎(chǔ)上,增加神經(jīng)網(wǎng)絡(luò)諧波電流環(huán),通過自適應(yīng)線性神經(jīng)網(wǎng)絡(luò)(ADALINE)算法實現(xiàn)對主要電流諧波的分解和提取,將所提取的電流諧波經(jīng)過神經(jīng)網(wǎng)絡(luò)訓(xùn)練獲得補(bǔ)償電壓值進(jìn)行諧波注入,實現(xiàn)電流諧波的檢測和抑制。 通過仿真和實驗結(jié)果證明,本文提出的控制策略可以有效提取并抑制電流諧波,降低電機(jī)轉(zhuǎn)矩脈動。
內(nèi)置式永磁同步電機(jī)(Interior Permanent Magnet Synchronous Motor, IPMSM)具有功率密度高、效率高、調(diào)速范圍寬等優(yōu)點,廣泛應(yīng)用于電動汽車電驅(qū)動系統(tǒng)中。其相電流的正弦度是衡量控制性能的重要指標(biāo),影響電流諧波的主要因素有兩類:①電機(jī)本體方面。如磁路不對稱、磁路飽和現(xiàn)象等引起的氣隙磁場畸變;②逆變器方面。由于死區(qū)效應(yīng)和開關(guān)管導(dǎo)通壓降等非理想特性因素的存在,使調(diào)速系統(tǒng)引入了大量的電流諧波,在低速區(qū)尤為嚴(yán)重。由于電流諧波的存在,影響了輸出轉(zhuǎn)矩的平滑度,引發(fā)轉(zhuǎn)矩脈動,進(jìn)而產(chǎn)生電磁噪聲和振動問題。
針對IPMSM的電流諧波畸變問題,國內(nèi)外學(xué)者進(jìn)行了深入的研究,主要分為三類:
第一類是模型補(bǔ)償法,如文獻(xiàn)[5-8]所述,通過建立電壓型逆變器(Voltage Source Inverter, VSI)死區(qū)時間引發(fā)的電壓畸變模型,采用前饋控制進(jìn)行補(bǔ)償,然而這類補(bǔ)償措施依賴于電流的方向判斷,電流過零點附近,易出現(xiàn)誤判斷。
第二類方法從電機(jī)本體優(yōu)化角度出發(fā),如斜槽法和分?jǐn)?shù)槽法等,見文獻(xiàn)[9-11],該類方法大多會使得電機(jī)結(jié)構(gòu)復(fù)雜,加工難度提高,部分算法會導(dǎo)致電機(jī)的平均轉(zhuǎn)矩下降。
第三類方法利用控制算法抑制電流諧波的畸變,見文獻(xiàn)[12-18],其中文獻(xiàn)[12, 13]中提到利用5次和7次同步旋轉(zhuǎn)變換進(jìn)行諧波提取,通過電壓注入法實現(xiàn)電流諧波的抑制,然而這種方法增加了兩組PI控制器,調(diào)節(jié)參數(shù)較多,設(shè)計較為困難。
文獻(xiàn)[14, 15]中利用諧振控制器組成比例積分諧振(Proportional Integration Resonance, PIR)控制器抑制指定次電流諧波,然而諧振控制在實驗中實現(xiàn)較為困難,需要額外的近似或者改進(jìn)措施。文獻(xiàn)[16-18]將神經(jīng)網(wǎng)絡(luò)算法與電壓畸變結(jié)合,來抑制電流的6次諧波,其中文獻(xiàn)[16]的補(bǔ)償方法需要更細(xì)分的劃分扇區(qū)。文獻(xiàn)[18]利用電流控制器積分的結(jié)果補(bǔ)償諧波,該方法依賴于高精度的電流傳感器。
本文提出一種基于自適應(yīng)線性神經(jīng)網(wǎng)絡(luò)(Adaptive Linear Neural Network, ADALINE)算法的PMSM諧波電流提取和抑制方法。首先,構(gòu)建了由死區(qū)效應(yīng)產(chǎn)生的電流諧波的數(shù)學(xué)模型;其次,直軸和交軸電流的6次和12次諧波,通過ADALINE算法進(jìn)行提取;最后,利用神經(jīng)網(wǎng)絡(luò)訓(xùn)練獲得的補(bǔ)償電壓值注入電機(jī)的三相繞組中,實現(xiàn)對電流諧波的提取和抑制。仿真和實驗結(jié)果表明,所提出的算法可以有效提取電流諧波,減小電流畸變。
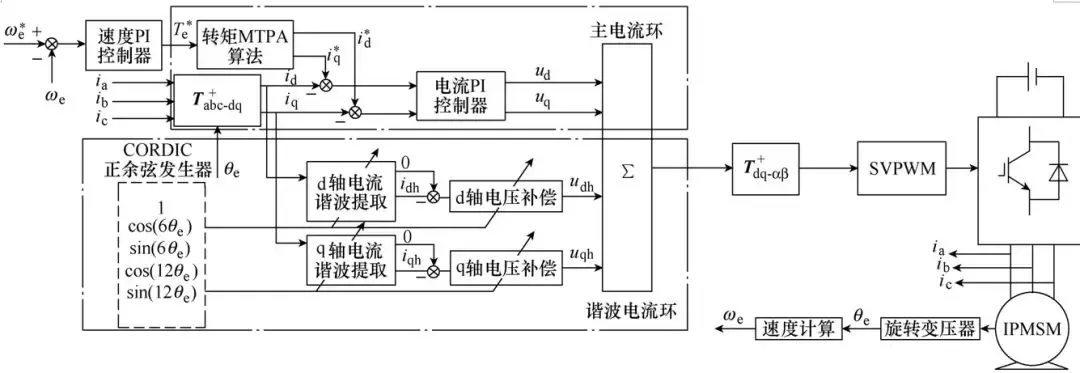
圖5 基于ADALINE電流諧波補(bǔ)償算法永磁同步電機(jī)矢量控制系統(tǒng)框圖
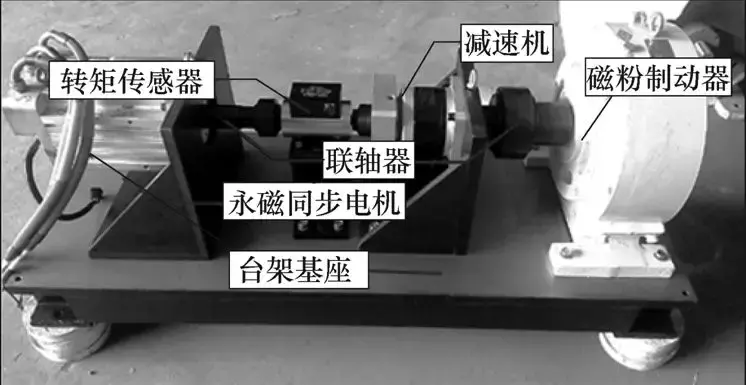
(a)永磁同步電機(jī)實驗臺架
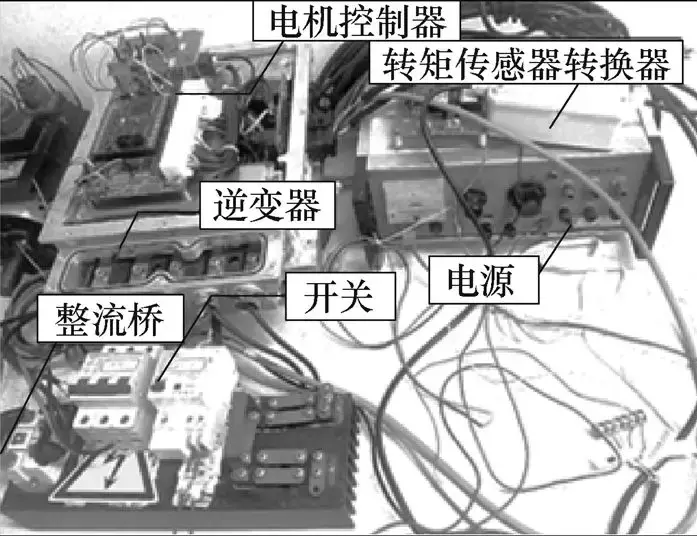
(b)控制器
圖11 永磁同步電機(jī)控制系統(tǒng)平臺基本結(jié)構(gòu)
結(jié)論
本文著重分析了死區(qū)效應(yīng)對IPMSM諧波電壓和諧波電流的影響,在同步旋轉(zhuǎn)坐標(biāo)系下主要表現(xiàn)為6次和12次電流諧波,針對上述諧波問題,利用ADALINE算法將諧波電流以權(quán)值調(diào)整方法進(jìn)行提取,再以諧波為零為目標(biāo),利用ADALINE算法轉(zhuǎn)化為諧波電壓注入到電機(jī)三相繞組中。
所提出的諧波抑制方法能夠在低速條件下提取并抑制IPMSM的指定次諧波電流,仿真和實驗證明了所提出算法對于諧波電流提取和抑制的有效性。
備檢修與故障診斷”專題征稿通知.jpg)
制和競價策略專題征稿.jpg)
鍵技術(shù)研究及其應(yīng)用”專題征稿通知.jpg)
電廠關(guān)鍵技術(shù)研究及其應(yīng)用”專題征稿通知.jpg)
開關(guān)設(shè)備關(guān)鍵技術(shù)”專題征稿.jpg)
設(shè)備關(guān)鍵技術(shù)”專題征稿.jpg)
配用電技術(shù)”專題征稿.jpg)

能技術(shù)及應(yīng)用專題征稿.jpg)
.jpg)
右側(cè).png)








