


- 頭條基于新型滑模觀測器的永磁同步電機無傳感器矢量控制系統(tǒng)2020-11-08 作者:張立偉、李行、宋佩佩、張鵬、云藍斯 | 來源:《電工技術(shù)學(xué)報》 | 點擊率:導(dǎo)語北京交通大學(xué)電氣工程學(xué)院的研究人員張立偉、李行、宋佩佩、張鵬、云藍斯,在2019年《電工技術(shù)學(xué)報》增刊1上撰文指出,現(xiàn)代永磁同步電機矢量控制系統(tǒng)中多采用機械式速度傳感器檢測轉(zhuǎn)子位置和轉(zhuǎn)速信息,因電機內(nèi)部工作環(huán)境復(fù)雜惡劣,機械式速度傳感器無法保證系統(tǒng)穩(wěn)定性,因此逐漸采用無速度傳感器進行控制。在眾多無速度傳感器控制中,滑模觀測器因具有對參數(shù)變化不敏感、魯棒性強而得到廣泛應(yīng)用。 基于sigmoid函數(shù)的傳統(tǒng)滑模觀測器控制系統(tǒng)因高頻信號切換導(dǎo)致系統(tǒng)存在較大抖振,針對這一問題,該文提出一種新型滑模觀測器,該觀測器采用分段指數(shù)型函數(shù)代替?zhèn)鹘y(tǒng)滑模觀測器中的開關(guān)函數(shù)。并利用Lyapunov穩(wěn)定判據(jù)對系統(tǒng)穩(wěn)定性進行分析。最后對所提出的新型滑模觀測器進行仿真分析和實驗驗證,結(jié)果表明,相比于傳統(tǒng)滑模觀測器,所提出的新型滑模觀測器性能更好,穩(wěn)定性更強。
永磁同步電機(Permanent Magnet Synchronous Motor, PMSM)因具有功率密度高、調(diào)速性能好等優(yōu)點而得到廣泛應(yīng)用。PMSM矢量控制中,一般需要在轉(zhuǎn)軸處安裝速度傳感器,實時反饋電機轉(zhuǎn)子的位置和速度,實現(xiàn)整個控制系統(tǒng)閉環(huán)運行。然而速度傳感器多為機械式結(jié)構(gòu),工作環(huán)境惡劣,易損壞,導(dǎo)致控制系統(tǒng)穩(wěn)定性出現(xiàn)問題。為了解決這一類問題,國內(nèi)外學(xué)者在無速度傳感器控制領(lǐng)域做了大量研究。
國內(nèi)外學(xué)者主要采用擴展卡爾曼濾波器法、模型參考自適應(yīng)法以及滑模觀測器法(Sliding Mode Observer, SMO)對無速度傳感器控制系統(tǒng)進行研究。其中,滑模觀測器受電機本身參數(shù)影響,具有較強的魯棒性,相比較其他兩種方法,該方法在無速度傳感器控制系統(tǒng)中具有更顯著的優(yōu)勢。
滑模觀測器的本質(zhì)是狀態(tài)重構(gòu),即重新構(gòu)造系統(tǒng)的狀態(tài),利用原系統(tǒng)可以直接測得的數(shù)據(jù)作為輸入量,經(jīng)過計算,使估算輸出值接近于原系統(tǒng)的實際輸出值。在PMSM矢量控制中,滑模觀測器的實質(zhì)是在觀測轉(zhuǎn)速和轉(zhuǎn)子所在位置時利用開關(guān)信號不斷變換系統(tǒng)結(jié)構(gòu),以很高的頻率正負(fù)切換,快速地修正反電動勢的值,使估算電流等于電機實際電流。由于PMSM的反電動勢中包含轉(zhuǎn)子位置和轉(zhuǎn)速信息,從而可以利用觀測器獲取的反電動勢信號得到轉(zhuǎn)子位置和轉(zhuǎn)速信息。
然而,滑模觀測器因其固有的不連續(xù)開關(guān)特性,加上電機引入額外電壓和電流噪聲信號,引起系統(tǒng)抖振。目前,削弱滑模觀測器抖振的方法是主流的研究方向。
- 有學(xué)者利用飽和函數(shù)代替?zhèn)鹘y(tǒng)滑模觀測器中的開關(guān)函數(shù),使系統(tǒng)在飽和層外呈開關(guān)函數(shù)變化,在飽和層內(nèi)線性變化,該方法能夠使得滑模觀測器運行在更低速場合。
- 有學(xué)者提出在傳統(tǒng)滑模觀測器的基礎(chǔ)上再加一階濾波器,實現(xiàn)二階濾波,實驗證明該方法能夠使系統(tǒng)更好地應(yīng)對負(fù)載擾動和參數(shù)動態(tài)變化。
- 有學(xué)者提出了全局終端滑模型飽和函數(shù)的概念,使得系統(tǒng)可以在有限時間內(nèi)得到收斂。
- 有學(xué)者提出了雙曲正切函數(shù)代替開關(guān)函數(shù)的切換方法,實驗證明該方法可以進一步降低抖振,提高轉(zhuǎn)速的估算精度,但算法比較復(fù)雜,不利于實際應(yīng)用。
- 有學(xué)者利用sigmoid函數(shù)代替開關(guān)函數(shù),有效地削弱了傳統(tǒng)滑模觀測器中固有的抖振,并省去了濾波環(huán)節(jié)。
- 有學(xué)者提出了一種正弦型軟開關(guān)滑模觀測器,并通過對比四種不同的飽和函數(shù)證明了正弦型軟開關(guān)滑模觀測器更為精確。
- 有學(xué)者在設(shè)計滑模觀測器時,除了利用電流量作為觀測對象外,還引入速度和角度作為狀態(tài)變量,使得系統(tǒng)更加穩(wěn)定。
- 有學(xué)者提出了一種基于一階滑模的工業(yè)電機傳動領(lǐng)域的轉(zhuǎn)子位置和轉(zhuǎn)速估算方法,通過大量實驗證明了一階滑模的可應(yīng)用性。
- 有學(xué)者提出了利用全局非線性分段函數(shù)重構(gòu)滑模控制器的電流方程,可以優(yōu)化控制系統(tǒng)性能。
- 有學(xué)者基于滑模變結(jié)構(gòu)控制理論,將滑模觀測器和滑模控制器結(jié)合到一個控制系統(tǒng)中,針對電機無法零速起動的問題,利用變頻變壓策略進行起動,起動成功后,采用時變滑模觀測器進行切換控制,該方法解決了滑模變結(jié)構(gòu)控制的低速起動問題。
- 有學(xué)者設(shè)計了一種三電平逆變電路對永磁同步電機進行驅(qū)動,基于硬件拓?fù)浣Y(jié)構(gòu)對電機模型進行改善,采用有限集模型預(yù)測控制策略,可以減小定子電流的諧波含量,改善系統(tǒng)的動態(tài)性能。
- 有學(xué)者結(jié)合非奇異終端滑模與線性滑模的優(yōu)點,設(shè)計了一種新型的全局終端滑模觀測器,該觀測器在抖振抑制效果與估算精度以及提高收斂速度方面均有明顯的改善。
- 有學(xué)者提出了一種以電流和磁鏈為估算目標(biāo)的新型滑模觀測器,通過對磁鏈估算值進行頻譜分析,明顯削弱了抖振,提高了系統(tǒng)的控制性能。
- 有學(xué)者利用轉(zhuǎn)速開環(huán)、電流閉環(huán)與滑模觀測器相結(jié)合的控制策略,低速時采用轉(zhuǎn)速開環(huán)、電流閉環(huán)控制,實現(xiàn)電機平穩(wěn)起動,中高速區(qū)域采用滑模觀測器控制,期間利用正弦型切換函數(shù)實現(xiàn)兩種控制方式的平穩(wěn)無誤差切換。
本文提出了一種新型滑模觀測器,該觀測器采用分段指數(shù)型函數(shù)代替?zhèn)鹘y(tǒng)滑模觀測器中的開關(guān)函數(shù),通過構(gòu)建李雅普諾夫(Lyapunov)方程對所提出的新型滑模觀測器進行了穩(wěn)定判定。最后通過仿真分析和實驗驗證,證明了該新型滑模觀測器在應(yīng)對轉(zhuǎn)矩突變和觀測速度方面具有顯著優(yōu)勢。
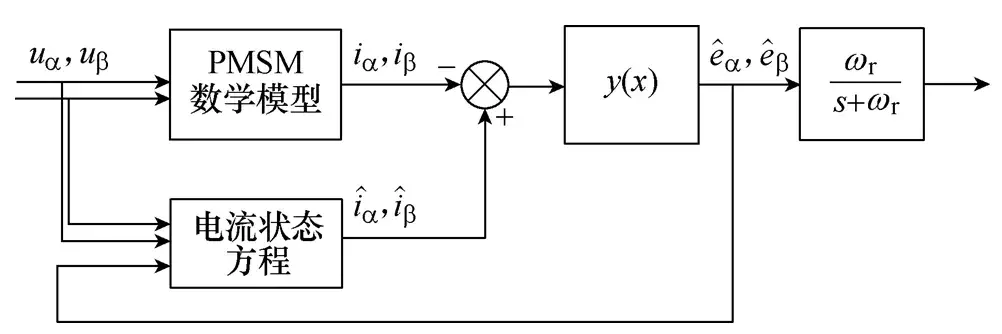
圖4 新型滑模觀測器結(jié)構(gòu)框圖
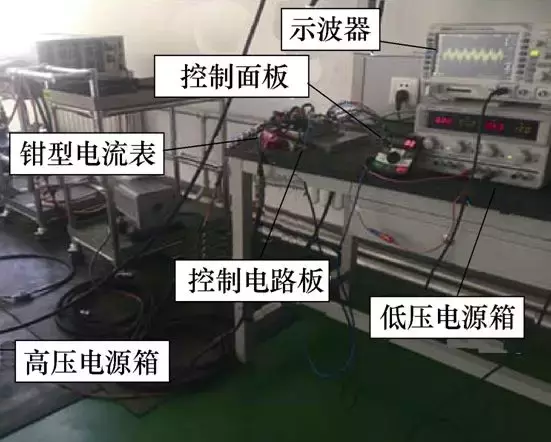
圖15 實驗平臺
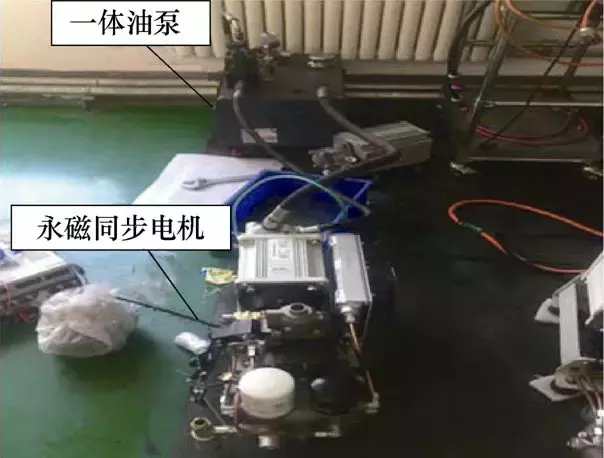
圖16 永磁同步電機一體泵
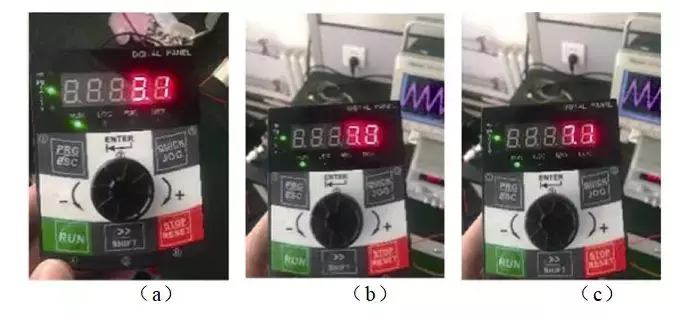
圖17 兩次加載的負(fù)載值
總結(jié)
本文采用分段指數(shù)型函數(shù)代替?zhèn)鹘y(tǒng)滑模觀測器中的開關(guān)函數(shù),旨在削弱傳統(tǒng)滑模觀測器控制系統(tǒng)中因高頻信號切換引起的系統(tǒng)抖振,通過Lyapunov穩(wěn)定性判據(jù)對所提出的基于新型滑模觀測器的控制系統(tǒng)進行了穩(wěn)定判斷,并提出了穩(wěn)定條件,通過Matlab/Simulink仿真平臺對該系統(tǒng)進行了仿真驗證,經(jīng)過與基于sigmoid函數(shù)的滑模觀測器的控制系統(tǒng)仿真結(jié)果和實驗結(jié)果進行對比,可以看出新型滑模觀測器在抑制轉(zhuǎn)矩脈動、維持三相電流穩(wěn)定、轉(zhuǎn)速估算以及應(yīng)對負(fù)載突變的能力方面均具有顯著優(yōu)勢。
備檢修與故障診斷”專題征稿通知.jpg)

鍵技術(shù)研究及其應(yīng)用”專題征稿通知.jpg)
電廠關(guān)鍵技術(shù)研究及其應(yīng)用”專題征稿通知.jpg)
開關(guān)設(shè)備關(guān)鍵技術(shù)”專題征稿.jpg)
設(shè)備關(guān)鍵技術(shù)”專題征稿.jpg)
配用電技術(shù)”專題征稿.jpg)

能技術(shù)及應(yīng)用專題征稿.jpg)
.jpg)
右側(cè).png)








